MSM Systems Ltd is a Micro SME that carries out small, technology research for the UK Ministry of Defence (MoD). Very little of what we do can be displayed publicly. However this one-page website will give you an insight to the company.
MSM Systems Ltd – About;
I'm, Mike McKean and CEO of MSM Systems Ltd. I am ex Royal Corps of Signals. (I am a bit older now, see picture at foot of this page). I'm also an invited technical adviser to Dstl on SAPIENT.
MSM Systems Ltd, is just me, but that’s not been a problem for the MoD. They know me, they have contracted directly with my Micro Company, for three successfully delivered research projects. No middle-men, no Prime's just me contracting directly with the MoD.
But how do I deliver? Why do the MoD trust me? Here's why; I lead the projects and partner with Research Professors from Universities, Distributors, other SME’s and manufacturers.
Everyone communicates transparently, and openly. The result; no miscommunication, no surprises, less risk.
To further reduce your risk, and mine, I design and build a prototype before any engagement.
By building prototypes, I maintain a good understanding of modern technology, and at the same time, I better understand the work involved in building a system.
Apart from Processor/Network Cards etc, I design and build all parts myself. This benefits customers greatly, as the modules are then designed for that specific task.

So what does MSM Systems Ltd do?
I have worked designed and led projects, supported by other SME’s, Research Professors from Universities, and contractors, to deliver three projects. One was for the research part of the MoD, called the Defence Science & Technology Laboratory (Dstl), the second was for the MoD’s Submarine Deliver Agency (SDA), but the only one I can describe in any way was my first project called LYNX.
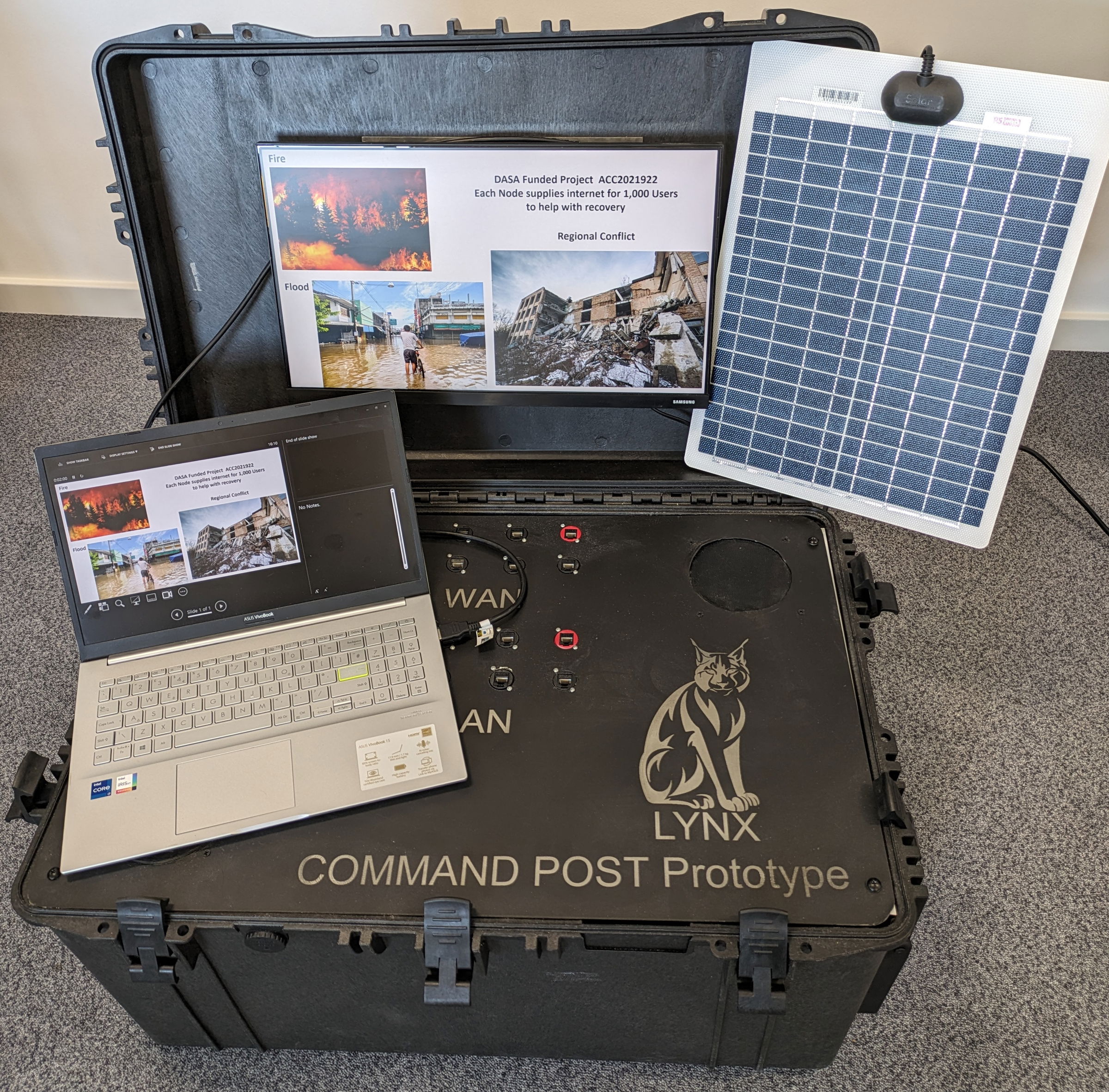
LYNX was also a project for the MoD. If you are in the military or MoD, it's best explained as similar to a combination of three systems; BAE Trinity, BAE NetVIPR™ and OpNET (a datacentre with applications in a portable box).
LYNX integrates communications across all domains, and from VLF through to Free Space Optical. For marine communication includes; VLF, Acoustic and DCCL technologies.
In the event below, I was invited to present LYNX to a combined QinetiQ and Dstl event and various members of the MoD. As a result, I secured a project for Dstl (the MoD’s research facility) and was also invited to present LYNX to NATO’s UK, Allied Rapid Reaction Corps.




Questions?
My name is Mike McKean. I’m the CEO of MSM Systems Ltd. I only started promoting MSM Systems Ltd about five years ago. I’m a big believer in being open and honest. That’s always been a problem for me in Business, but customers love it.
I am quite technical, but I cannot do everything. But I can compete with the largest companies in the world, and I do that through open, honest partnering with you, other SME’s (as long as I lead) and with Research Professors (and sometimes students), as well as external contractors.
Contact;

MSM Systems Ltd, 23 Sparcells Drive, Sparcells, Swindon, SN5 5FY
Company Reg: 08708498, VAT: 224465712, DUNS 21-965-7936